電子部品・半導体業界 テーマ別センサ活用提案集


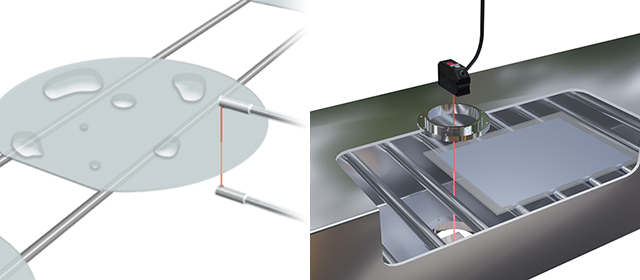
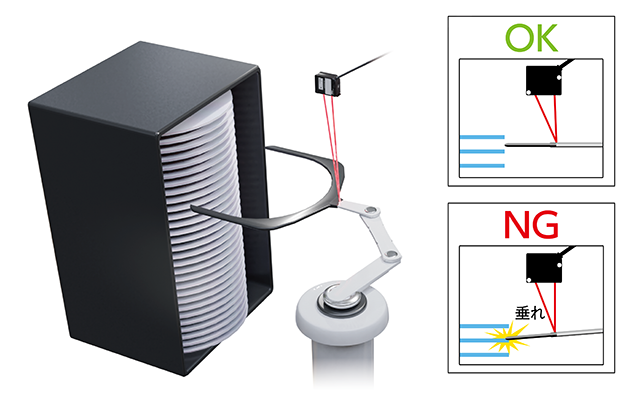
搬送ロボットのアームが垂れてフープ内の別ワークに接触
してしまう。
何かロボットアームの垂れを計測できる⽅法はありませんか︖


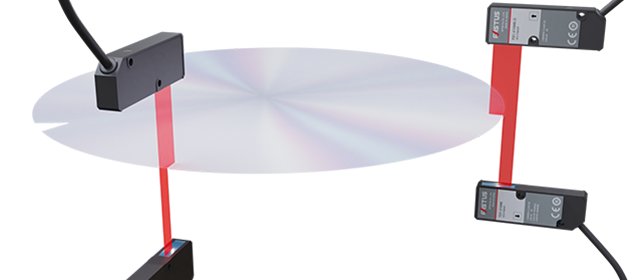
・CD2Hシリーズであれば、⻑距離を⾼精度で検出可能です。
最⻑︓1,200mmの測定が可能です。
・⻑距離計測によりビューポート越しでの測定も可能です。
・独⾃開発の超⾼感度イメージセンサ・ATMOSにより、ワークの急激な⾊の変化にも対応可能。
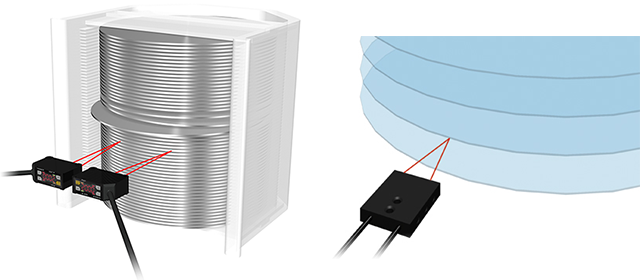
・IO-Link対応で簡単に、より正確な測定値の取得が可能︕
| 種 類 | 測定範囲 | 繰返精度 | リニアリティ | インター フェース |
型 式 | 詳細ページ | |
|---|---|---|---|---|---|---|---|
| コード式 | コネクタ中継式 | ||||||
 |
 |
0.1μm | ±0.1% of FS |
アナログ出力 制御出力×2 外部入力 |
CD2H-30 | CD2H-30M12 | |
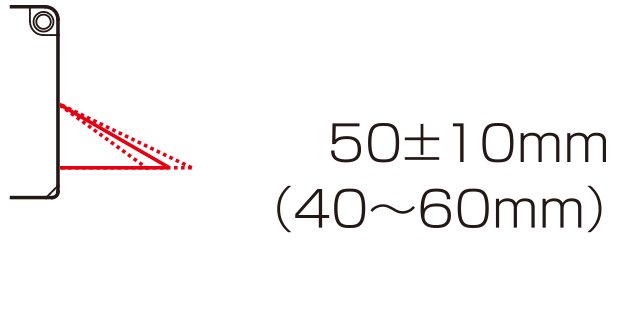 |
0.2μm | ±0.1% of FS (±0.02mm) |
CD2H-50 | CD2H-50M12 | |||
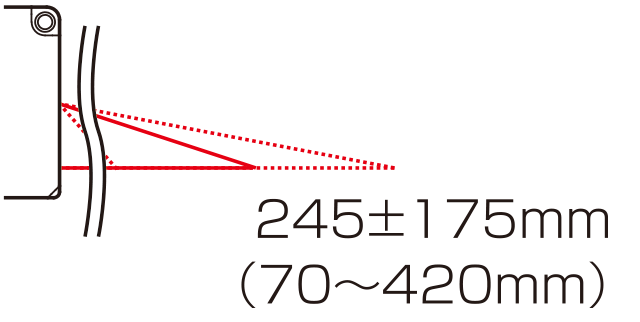 |
10μm | ±0.1% of FS (±0.35mm) |
CD2H-2452 | CD2H-245M122 | |||
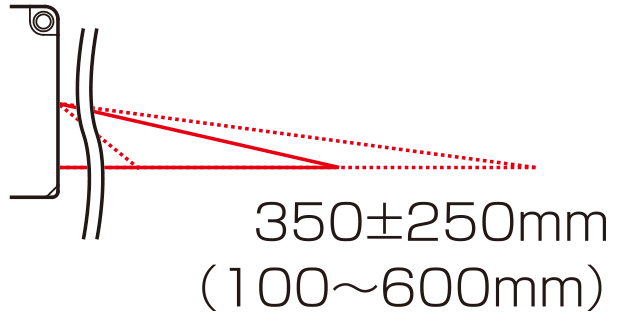 |
20μm | ±0.1% of FS (±0.5mm) |
CD2H-3502 | CD2H-350M122 | |||
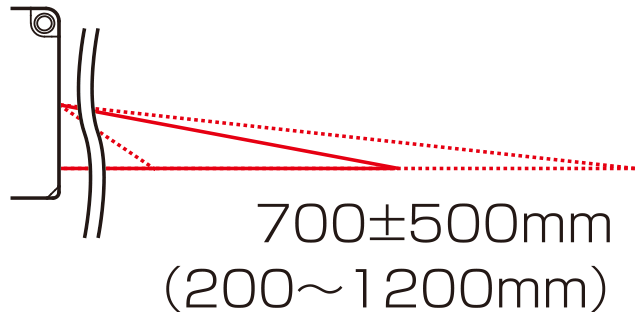 |
100μm | 測定範囲200~700mm: ±0.1% of FS( ±1mm) 測定範囲700~1200mm: ±0.3% of FS( ±3mm) |
CD2H-7002 | CD2H-700M122 | |||
| 型式 | 製品画像 | 最大接続デバイス数 | 対応フィールドネットワーク | 詳細ページ |
|---|---|---|---|---|
| UR-MS16DT | 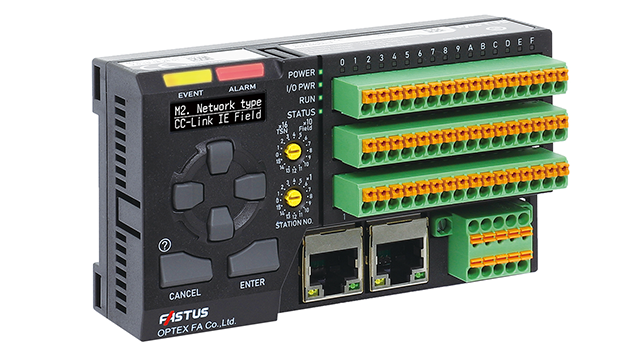 |
16台 |  |
|
| UR-ES16DT | 16台 |  |
オプテックスグループ
Copyright(c)OPTEX FA CO.,LTD. All Rights Reserved.