CCD素子(Charge Coupled Device)やCMOS素子(Complementary Metal Oxide Semiconductor)などのイメージセンサを用いたカメラで、撮影した物体の画像をデジタル信号に変換、演算することにより、物体の面積、長さや幅、色、位置、形状などの特徴を抽出し、設定された条件を元にOK/NG判定をしたり、データを出力するものです。

異種混入検査
部品の表裏・方向判別
部品の形状・欠け検査
部品在籍確認
色・汚れ検査
印刷物の乱丁検査
色による仕分け
賞味期限やロットNo.などの
印字検査(文字認識)
印字やラベル、マークなどの
有無検査
位置決め
計測
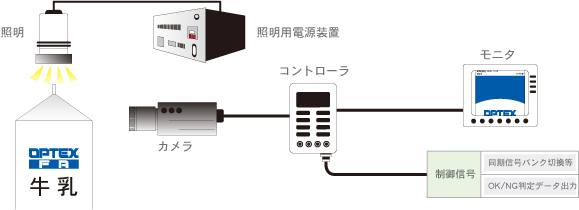
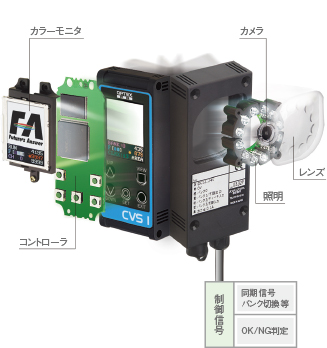
当社画像センサは、高機能な「分離型」とローコストな「オールインワン型」の2つのシリーズがあります。
カメラ、コントローラ、モニタ、照明、照明用電源装置の5点で構築します。

| 用語 | 用語説明 |
| 解像度 | レンズの焦点面に結像した画像で1mm辺り何本の線を識別できるかの指標。解像度が高いレンズほど高精細に撮像できる。 |
| 有効画素数 | イメージセンサの総画素の中から実際に処理に使う画素数。イメージセンサの周辺部は歪が大きくノイズ゙が乗りやすいので切り捨てて使用するのが一般的。 |
| 焦点距離 | 平行な光が焦点を結ぶ位置とレンズ中心の距離。広角レンズほど焦点距離が短い。f25mm等と表記(小文字のf)。 |
| 被写界深度 | ピントの合う範囲のこと。アイリスを絞ると被写界深度は深くなる。DOF(Depth Of Field)と表記する。 |
| ディストーション | 歪曲収差。ディストーションが大きいと、レンズ周辺部にいくほど歪曲して結像する。 |
| 画角 | 撮影された画面範囲をイメージセンサ素子との対比で角度表記したもの。画角が小さいほど被写体はズームされディストーションは小さくなる。 |
| WD ワーキングディスタンス |
レンズ鏡筒の先端からワークまでの距離。WD(Working Distance)と表記する。 |
| 視野(FOV) | 使用カメラで見える物体側の範囲(Field of view)。 |
| 光学倍率 | イメージセンサ寸法と実視野との比較倍率。光学倍率2倍のレンズとは画像がイメージセンサ寸法の2倍に拡大されるレンズで視野は1/2になる。 |
| モニタ倍率 | モニタ上の撮像寸法と実視野との比較倍率。モニタ倍率100倍のモニタであれば実視野の100倍でモニタに映すことができる。 |
| シャッター時間 | シャッターを開放する時間。移動物体のスピード゙、ライティング状態に合わせて決める。「移動距離/1Sec.×シャッター時間=画像ブレ量」。シャッター時間を短くすると高速移動物体を静止画像として処理できるが、CCDがチャージする光量が減るので撮像画像が暗くなる。反対にシャッター時間を長くすると撮像画像は明るくなるが、移動物体がブレて鮮明に映らない可能性がある。 |
| 2値化処理 | 濃淡(グレー)画像を白(1)と黒(0)の2値に変換して処理する前処理の一種。情報量が少なくなるので処理時間が早くなる反面、高精度な処理には向かない。カラー処理の場合は抽出色が1、それ以外の色が0となる。 |
| 濃淡(グレー)処理 | イメージセンサから取り込んだ多階調の濃淡(グレー)情報をそのまま使い処理する方法。高精度な処理が可能な反面、情報量が多くなるので処理時間が遅くなる。 |
| サブピクセル処理 | 1/10画素のこと。周辺の画素濃淡情報から仮想の0.1画素単位まで計算する。高精度な測定が可能になる。 |
| プログレッシブスキャン | 1回の画面表示を1回の走査で行なうスキャン方式。全画素読出し方式・ノンインターレース方式・順次走査方式ともいう。インターレース方式に比べ画質は向上するが、情報量が多いため転送に倍の時間が掛かる。このスキャン方法で構成された画像をフレーム画像という。 |
| パターンサーチ | 基準となるモデル(雛形)画像を登録しておき撮像画像の中から最も似ている部分を探し出す処理。アドレス(XY)・角度(θ)・相関値などを出力することが可能。また位置補正にも使用できる。 |
| インターレーススキャン | 1回の画面表示を奇数列と偶数列に分けて行なうスキャン方式。飛越し走査方式ともいう。プログレッシブ方式に比べ画質は落ちるが、情報量が少ないため転送時間が1/2になる。このスキャン方法で構成された画像をフィールド゙画像という。 |
| 接写リング | レンズの焦点距離を変化させるスペーサー。レンズの性能以上に接写する場合に使用する。 |
| 偏光フィルタ | 一定方向の光だけを通す性質を持っているフィルタ。PLフィルタともいう。光沢ワーク表面の正反射をカットして散乱光のみを観察でき、照明の映り込みを消したい場合に有効。 |